




UWB定位算法對比

TOF(Time of Flight飛行時間)
原理說明:以基站為圓心,以標簽和基站距離為半徑畫圓/球,相交區域即為標簽位置。標簽和基站間的距離是通過多次收發脈沖測量的(TWR算法)。
優勢:算法簡單直觀,精度較高。
劣勢:標簽較費電,標簽并發容量小。
TDOA(Time Difference of Arrival到達時間差) ?
基站彼此要做好高精度時間同步(以UWB信號做無線時間同步為主流),有TDOA上/下行之分。在上行TDOA模式下,標簽定期向基站廣播UWB信號;下行TDOA模式下,標簽從基站接收UWB信號。根據標簽到不同基站收發UWB信號的時間差值可畫出多條雙曲線,其相交區域即為標簽位置。
優勢:標簽較省電(上行TDOA模式時),標簽并發容量大。
劣勢:研發難度大(同步算法、定位算法較復雜),部署難度大(基站之間要做高精度時間同步)。
AOA(Angle of Arrival到達角度)
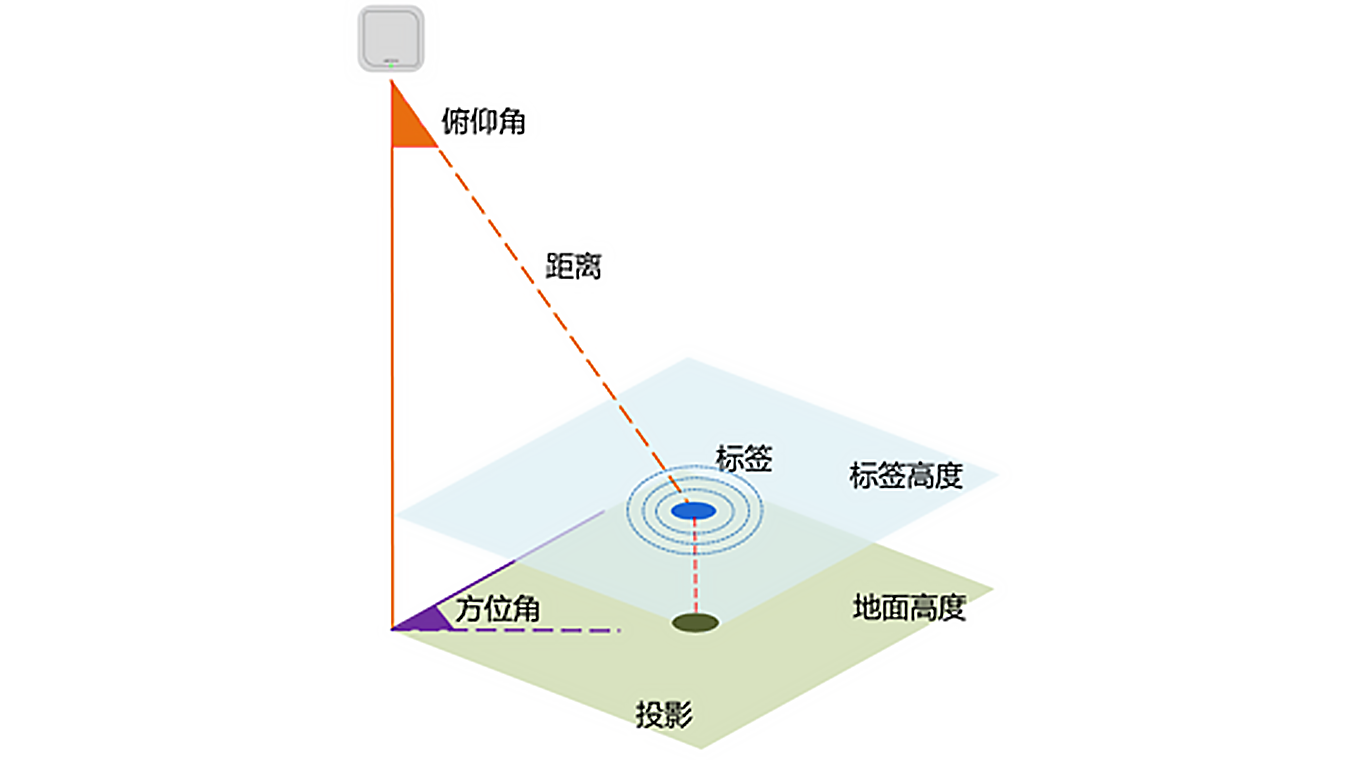
此定位方式需要在UWB基站上集成有UWB天線陣列,UWB天線陣列通過PDOA(Phase Difference of Arrival到達相位差)方式來判斷信號角度。同一個標簽發射的UWB信號到達不同定位基站的角度連線的交點,就是標簽的位置。
在工程實際中,AOA可以與TOF結合,測量標簽立體角度的同時也測量標簽相對基站的距離,讓單臺UWB基站具有三維定位能力。這種技術方案可以顯著降低UWB系統的造價,有望成為UWB定位最主要發展方向。
優勢:所需基站數量少,部署簡單直觀。
劣勢:研發難度大(天線設計、算法設計、量產)。 ? ?

